CSCI 545 - Python, NumPy, ROS
Fundamentals of the robotics software stack.
Bryon Tjanaka | 1 September 2021

Python at a Glance
- High-level interpreted language
- Great for prototyping
- Slow... but can talk to C/C++/Fortran code
- Mature (30+ years)
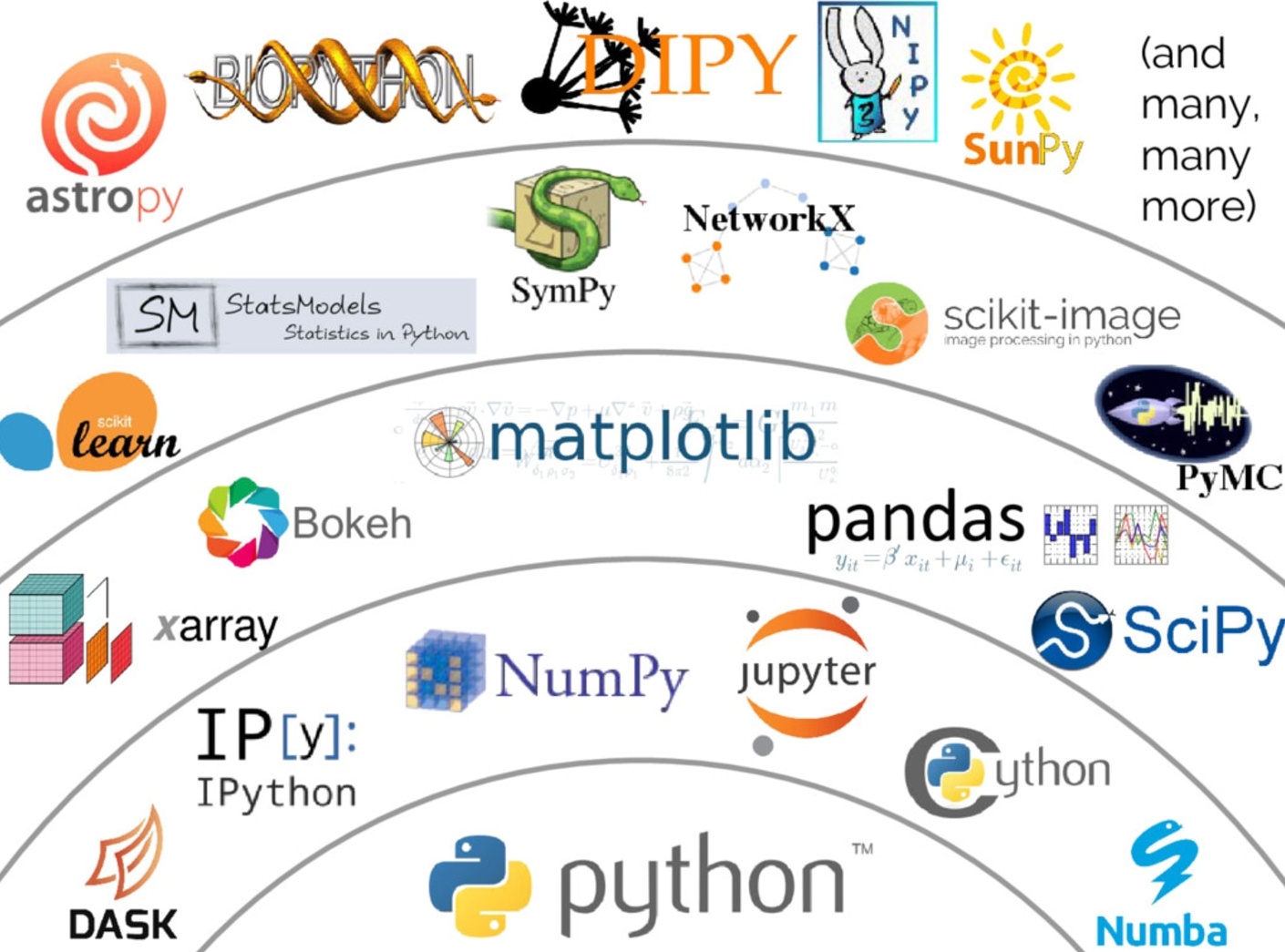
- Large ecosystem (e.g. Python scientific stack)
- Popular in robotics research
- Often cited as remarkably similar to pseudocode
- Play around if you are not familiar → Tutorial
Language Constructs (Demo)
- Assigning variables
- Types: int, float, str, list, tuple, set, dict
- String ops: split, f-strings
- If statements
- For loops: lists, ranges, enumerate
- While loops
- Exception Handling
- Functions and kwargs
- Classes
Example Programs
def greatest_common_divisor(x, y):
r = x % y
while r > 0:
if r == 0:
print("GCD:", y)
else:
x, y = y, r
import numpy as np # 12-line neural network.
X = np.array([ [0,0,1],[0,1,1],[1,0,1],[1,1,1] ])
y = np.array([[0,1,1,0]]).T
syn0 = 2*np.random.random((3,4)) - 1
syn1 = 2*np.random.random((4,1)) - 1
for j in xrange(60000):
l1 = 1/(1+np.exp(-(np.dot(X,syn0))))
l2 = 1/(1+np.exp(-(np.dot(l1,syn1))))
l2_delta = (y - l2)*(l2*(1-l2))
l1_delta = l2_delta.dot(syn1.T) * (l1 * (1-l1))
syn1 += l1.T.dot(l2_delta)
syn0 += X.T.dot(l1_delta)
Other Cool Libraries and Tools
- Seaborn - High-level plotting utilities
-
pyinstrument
- Profiler
- (i.e. find out why your code is slow)
- Python Fire - Easy command line interfaces
- Gin - Nice way to do configuration
- tqdm - Progress bars
- By yours truly: pyribs, logdir
Python Gripes / Problems
-
Python = scripting language
- Designed to glue things together
-
Problems:
- Slow → JITs like numba can help
- No type checking → Linters like pylint help
- Clunky package management
- Bad concurrency support (search up "Python GIL")
NumPy provides arrays that are:
- Fast
- Typed
- Fixed-size
- n-dimensional
Features (Demo)
- Array creation: from lists, ones, zeros, empty, dtype
- Array properties: shape, dtype, ndim
- Indexing
- (Element-wise) arithmetic
- Matrix multiplication
- Randomness: default_rng, standard_normal
- Avoid np.random since it is global
Robot Communication
We need to:
- Connect sensors (e.g. cameras in eyes)
- Command motors (e.g. arms and legs)
- Run various processes (e.g. localization)
Introducing ROS (Robot Operating System)
- Middleware (not an OS)
- Developed at Willow Garage in 2000s
- Primarily Linux-based
- C++, Python, many other languages
- Facilitates a heterogeneous computer cluster
- Sensors, motors, processors, etc.
- This class: ROS1 with Ubuntu 16.04
ROS Architecture: Publish/Subscribe
- Nodes: Executables wrapped with ROS magic
-
Master node: Name service
- (helps nodes find each other)
- Topics: "Mailboxes" for node data
Example
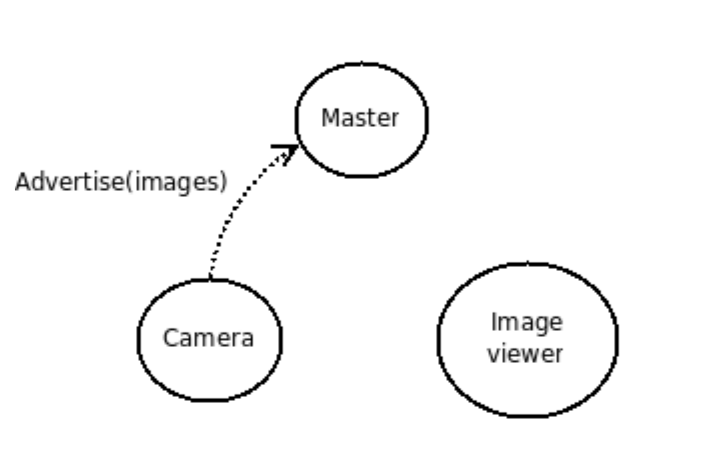
Camera wants to publish what it sees
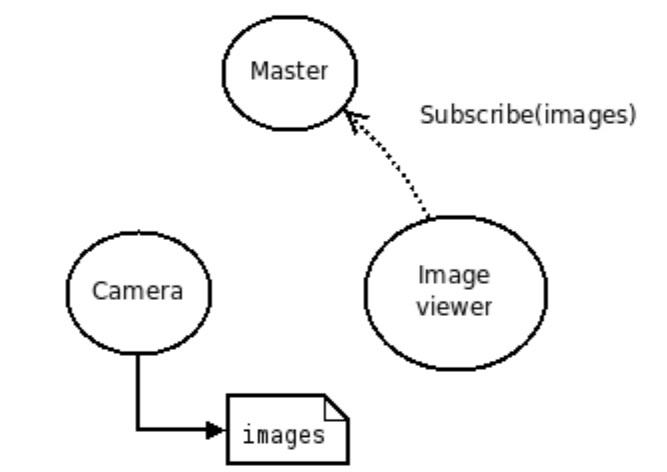
Image viewer wants to subscribe to topic "images"
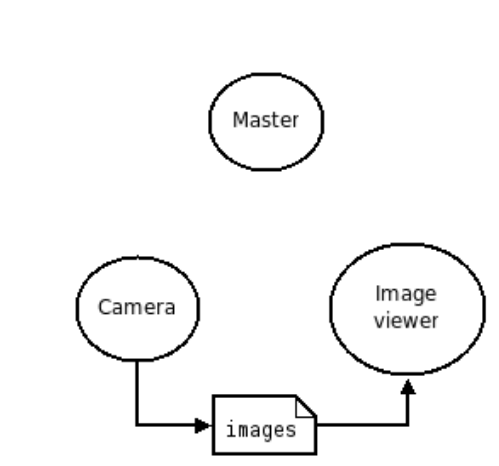
Camera sends images to image viewer
Commands (Demo)
roscore # Start master node
rosrun turtlesim turtlesim_node # Run turtlesim
rosrun turtlesim turtle_teleop_key # Control turtlesim
rosnode list # List nodes
rostopic list # List topics
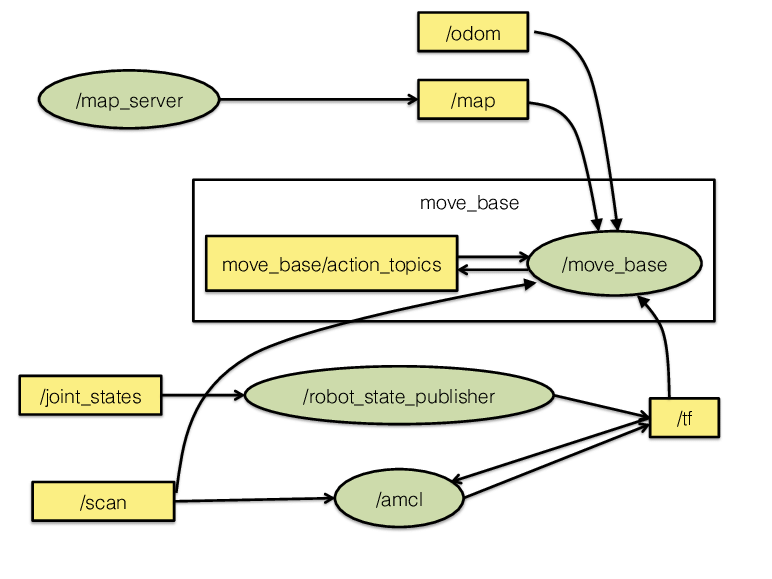
rqt_graph # View node and topic graph
rosrun rqt_plot rqt_plot # Plot turtle pose
rviz # 3D visualization; we won't
# see anything since this
# is just the turtlesim.
Miscellaneous
- Catkin: Package and workspace management
- Services: Immediately get a response
- Bagging: Record and replay sessions
- Gazebo: Awesome simulator